Research
Coverage path planning (CPP) for USV-assisted coastal bathymetric survey
Featuring agile operational ability and low financial costs, unmanned surface vehicle is a desirable tool to perform bathymetric mapping for coastal regions. However, the CPP problem for bathymetry remains an ongoing challenge due to its NP-hard feature, conflicting objectives, and complex ocean environments. This research aims to design effective mathematical models and solvers to address these challenges. We use knowledge from remote sensing, optimization, robotics, and marine engineering to develop algorithms for optimal solutions. Numerical simulations and lake trials are performed to validate the effectiveness in practical applications. 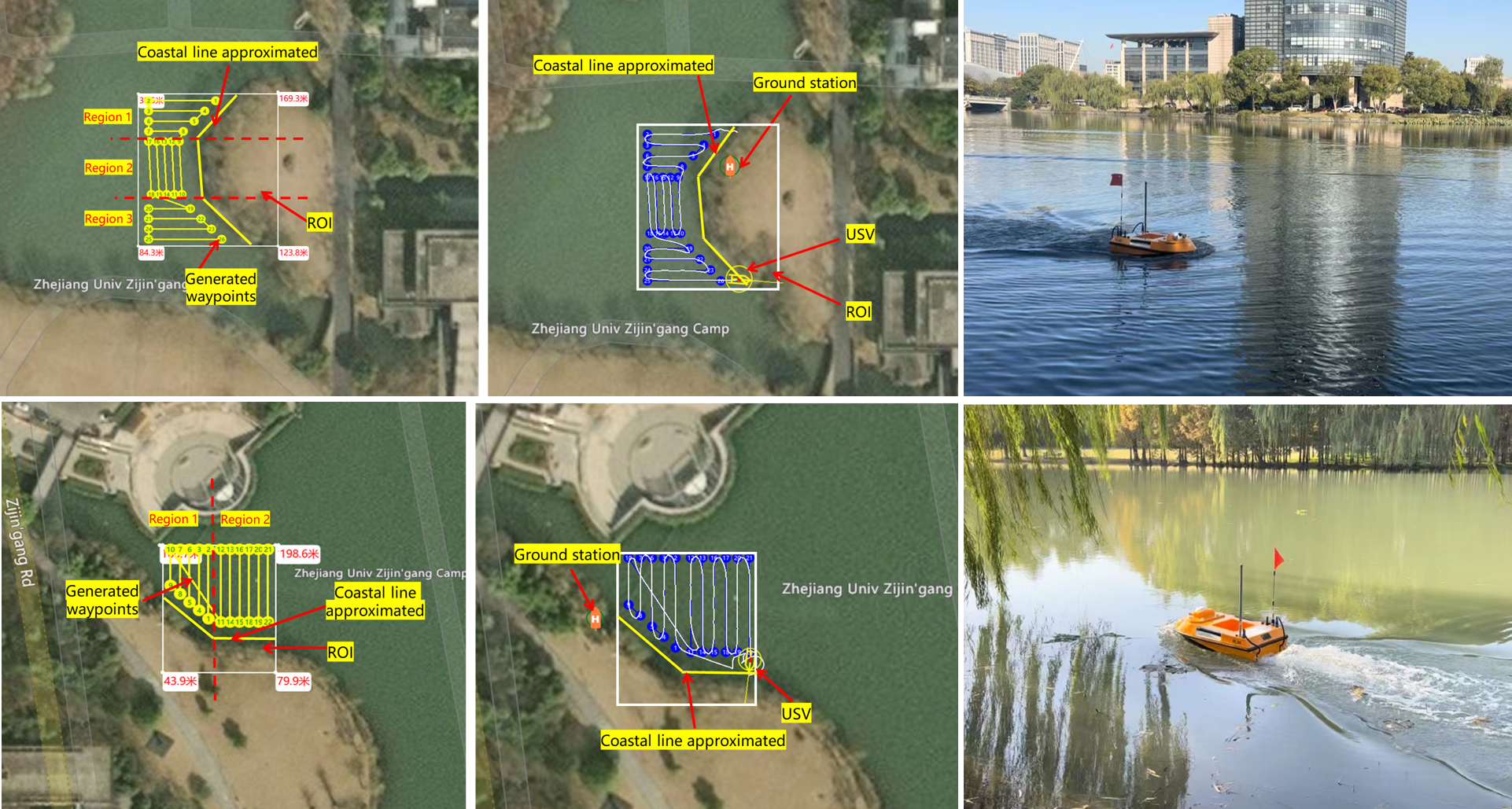
Path planning for USV-assisted maritime data harvesting
The imminent deployment of USV is one of the primary drivers for the Smart Ocean due to their strong mobility in performing maritime data collection. However, path planning for data harvesting remains an open issue since it requires the integration of communication channels, obstacle avoidance, and motion dynamics under a unified framework. This research aims to present the pioneering work to design models and approaches that seamlessly bridges these factors within a single cohesive sheme. We use knowledge from wireless communication, computer science, robotics, and marine engineering to obtain reliable trajectories. Theoretical and numerical analysis are performed to validate the performance pertaining to its convergence, parameter sensitivity, and reliability. 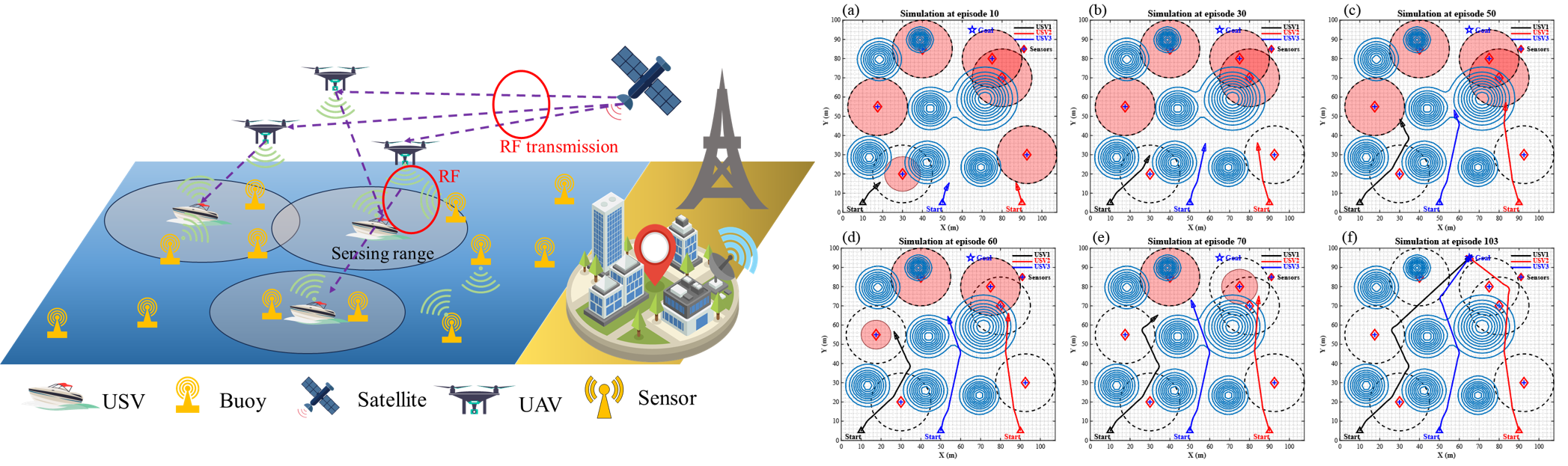
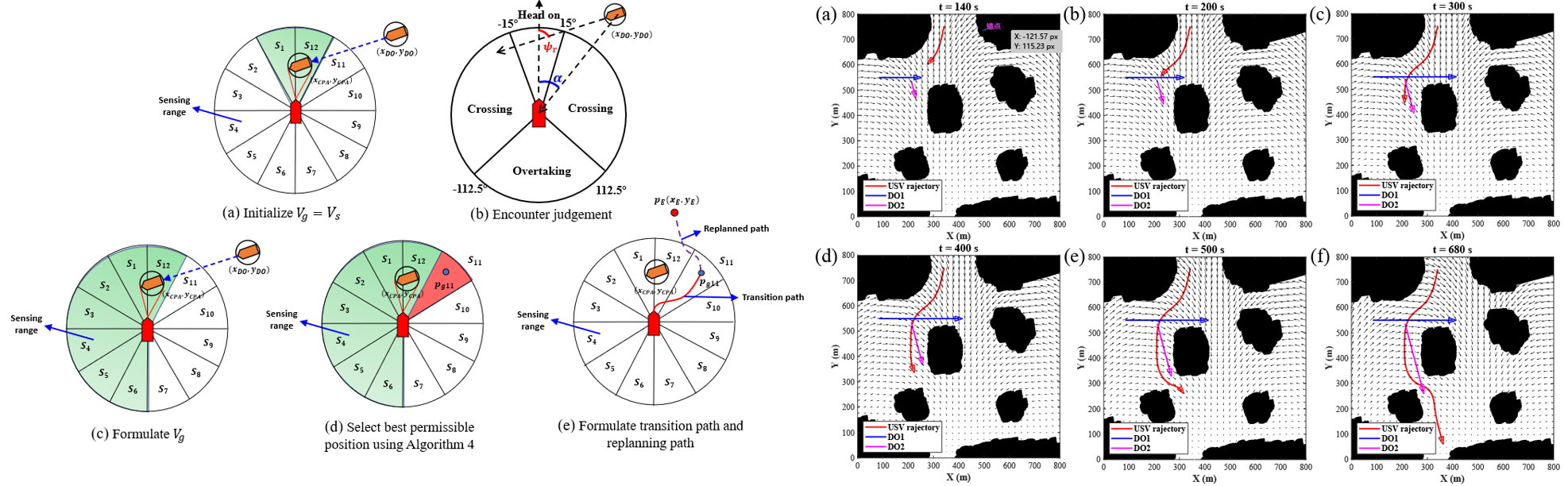
Path planning for autonomous surface ships under complex environment
Navigating unmanned surface vehicles in the intricate and unpredictable oceanic environment poses an indispensable challenge for path planning. This research aims to design a path planning framework which merits autonomous global-planning and local-reaction to adapt the complex environments. We consider the ocean current effects, obstacle avoidance, and COLREGs to ensure the safe and efficient navigation of USVs. Theoretical and numerical analysis are performed to validate the performance pertaining to its convergence, parameter sensitivity, and reliability.